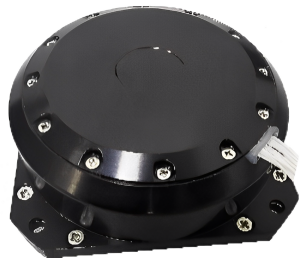
RLG 2 軸インデックス慣性航法システム




製品説明
RL2-90 慣性航法システム、正確な航法のための最先端のソリューション。タイプ 90 リング レーザー ジャイロスコープとクォーツ フレキシブル加速度計を装備しており、正確な速度、位置、姿勢情報を提供します。GNSS、高度計、対気速度計とシームレスに統合されているため、航空会社や地上航空会社に適しています。戦車、装甲車両、航空機、ドローン、船舶、高速鉄道のいずれにおいても、このシステムは信頼性の高い飛行制御、姿勢安定化、位置決めを保証します。純粋な慣性ナビゲーション モードと統合ナビゲーション モードの両方で高い精度を備えた RL2-90 は、さまざまなアプリケーションで信頼できる正確なナビゲーションを実現する信頼できるパートナーです。
P製品の特徴
l 誤差を軽減する 2 軸インデックス機構
l 高精度リングレーザージャイロとクォーツ加速度計
l オプションの静的または移動ベースのセルフアライメント
l 全温度範囲でのエラーパラメータの校正と補償
l GNSS/オドメーター/DVL用のオプションの多様な入力インターフェース
l 設定可能なナビゲーションモード
l 優れた環境適合性
l 軍事規格
A応用分野
l 海中車両ナビゲーション
l 陸上車両の測位と北探索
l 移動キャリアの安定化と制御
l 要求の厳しいアプリケーション向けの姿勢測定
MAIN関数
l キャリアの位置、方位、姿勢角、角速度、速度などの情報をリアルタイムに出力する機能を備えています。
l 純粋な慣性ナビゲーションや INS/GNSS (北斗を含む) 統合ナビゲーションなどの動作モードがあります。
l 外部時刻システム周波数標準装備により提供される衛星航法情報を受信する機能を有する。
l 地上自動整列機能があり、空中整列機能をサポートします。
l 電源投入時セルフテスト、定期セルフテスト、ステータスレポート、取り付けエラー補正、不揮発性ストレージなどの機能があります。
Pパフォーマンスインジケーター
| システムの精度 システムの精度 | 純粋な慣性航法/純粋な慣性航法 | 2.0nマイル/5日、ピーク | |
| 統合ナビゲーション/GNSSによるナビゲーション | ≤5m、1σ | ||
| ヘディング角度/ヘディング | 0.01°、RMS | ||
| 水平姿勢(ロールとピッチ) 水平姿勢(ロール&ピッチ) | 0.005°、RMS | ||
| 純粋な慣性速度 | 1.0m/s、RMS | ||
| GNSS 統合ナビゲーション 速度 | 0.1m/s、RMS | ||
| の指標 慣性デバイス ジャイロおよび加速度センサーのパラメーター | レーザージャイロスコープ_ ジャイロスコープ | 範囲/範囲 | ±600度/秒 |
| バイアスの安定性 | ≤0.002度/h、1σ | ||
| バイアスの再現性 | ≤0.002度/h、1σ | ||
| スケールファクターの非線形性 | 1ppm | ||
| 加速度計 加速度計 | 範囲/範囲 | ±15g | |
| バイアスの安定性 | ≤10μg、1σ | ||
| ゼロバイアス再現性 バイアスの再現性 | ≤10μg、1σ | ||
| スケールファクターの非線形性 | 15ppm | ||
| 時間を合わせる アライメント時間 | コールドスタート | 15分以内 | |
| 再起動 | 10分以内 | ||
| 空中/機内スタート | ≤15分 | ||
| 労働時間 稼働時間 | 連続使用時間/稼働時間 | 10時間以上 | |
| インターフェースの機能 インターフェース | 供給電圧/電圧 | DC18~36V | |
| 消費電力 | ≤ 40W @ 24VDC | ||
| 電気インターフェース/電気 | RS232×2 RS422×3 CAN×2 イーサネット×1 1pps×1 | ||
| データ更新速度 (構成可能) | 200Hz@115.2kbps | ||
| 使用環境 環境 | 動作温度 | -40℃~+65℃ | |
| 保存温度/保存温度 | -55℃~+85℃ | ||
| 高度/高度を使用 | 20000m | ||
| 湿度 | 95% (+25℃) | ||
| 振動・振動 | 5g @ 20~2000Hz | ||
| ショック/ショック | 40 g、11 ms、1/2 正弦波 | ||
| 物理的特性 物理的な | 寸法/サイズ (Φ*H) | 540×536mm | |
| 重量/重量 | 55kg | ||
注: 構造はユーザーの要件に応じてカスタマイズできます。